Conceptos básicos
Aquí encontraras algunos conceptos importantantes que son importantes para un entendiemiento completo de todo lo tratado en este sitio
fotografía
La fotografía es una técnica la cual busca capturar imágenes de manera permanente para posteriormente reproducirlas en medios físicos o digitales por medio de la proyección de la luz.
En la actualidad la fotografía tiene gran valor ya que se utiliza para la ciencia y es considerada una forma de arte, por lo cual ha evolucionado rápidamente y se han implementado algunas técnicas que mejoran o extienden las capacidades de una fotografía y es lo que comúnmente se conoce como fotografía computacional, puesto que es necesario contar con un software.
Además, hay dos tipos de fotografía, en primer lugar, está la fotografía afocal, la cual consiste en colocar la cámara fotográfica directamente en el ocular de un sistema óptico, reemplazando el ojo humano, como por ejemplo puede ser utilizada en un microscopio óptico o telescopio, tal como se puede observar a continuación
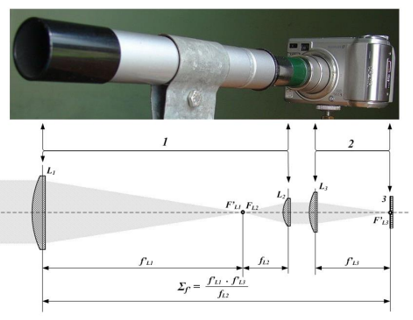
La fotografía afocal funciona con cualquier sistema que pueda generar una imagen virtual de luz paralela, debido a que el ocular del dispositivo de imagen produce luz colimada y con la lente de la cámara enfocada al infinito, crea un sistema afocal sin convergencia o divergencia neta en la trayectoria de la luz entre los dos dispositivos.
Por otro lado, el otro tipo de fotografía focal es la que se realiza normalmente situando el objeto frente a la cámara y capturando la imagen. Es importante tener en cuenta algunos conceptos importantes como:
• Distancia focal: Corresponde a la distancia entre el centro óptico del lente y el sensor de la cámara, a través de ella es posible clasificar cada objetivo en milímetros (mm de lente), cuando mas larga sea la distancia focal más larga será el lente físicamente.
• Angulo de visión: Es el área de la escena que captura el sensor de la cámara. Esta área se describe en grados de cobertura frente a la cámara.
• Campo de visión: se refiere al ángulo de visión de una lente determinada.
• Exposición: Indica la cantidad de luz que capta tu cámara
• Apertura: Es la apertura del objetivo, que controla la cantidad de luz que pasa a través de la lente hasta el sensor de la cámara y iene un efecto directo sobre la exposición; cuanto más abierta sea la apertura, más luz mostrará la imagen y cuanto más estrecha sea la apertura, más oscura será.
• Velocidad de obturación: Tiempo que el obturador de la cámara está abierto capturando luz. Una velocidad de obturación más corta se traducirá en una imagen más oscura, mientras que una velocidad de obturación más larga capturará una imagen con más luz
• ISO: Aumenta la información de luz capturada por el sensor de la cámara, cuanto mayor sea el ISO, más luz tendrá la imagen y cuanto menor sea el ISO, más oscura será la fotografía.
• Profundidad de campo: Es el espacio en la imagen que está aceptablemente nítido y enfocado
• Enfoque: Consiste en ajustar la lente para encontrar la máxima nitidez, contraste y resolución para fotografiar un sujeto determinado
• Nitidez: Es la claridad con la que se capturan y procesan los detalles en una imagen.
Cámara plenóptica

Una cámara plenóptica o de campo de luz actúa como un conjunto de microcámaras que registra no solo la intensidad de la luz.
En una cámara convencional se toman todos los rayos de luz que hay en la escena a la que estás tomando una foto y los interpreta como una sola fuente de luz mientras que en la camara plenoptica captura cada una de las fuentes de luz de la escena almacenando la intensidad de cada una de ellas y su dirección, por lo que esto permite manipular cada una de ellas por separado y tener la información de la escena desde diferentes puntos de vista.
Estas cámaras además de utilizar lentes clásicos utilizan también una matriz de microlentes para capturar la luz desde diferentes ángulos y que se sitúan justo detrás de la lente principal.
Las imágenes generadas por una cámara plenóptica tienen que ser procesadas para obtener una imagen resultante. Las ventajas son que, de esta manera, el enfoque de la imagen se puede variar computacionalmente después de que se haya tomado la imagen. Además, se puede calcular la profundidad de la escena.
El proceso de estimación de profundidad 3-D de una cámara plenóptica funciona de manera similar a un sistema de cámara estéreo y se basa en disparidades. Con una cámara plenóptica, es posible generar una imagen de campo de luz y un mapa de profundidad correspondiente al mismo tiempo. Una vez que se conoce el mapa de profundidad, la imagen de intensidad se puede reenfocar para aumentar la profundidad de campo
Campo de luz
Corresponde a una función matemática de tipo vector que almacena que almacena en sí misma la información de todos los rayos de luz en un espacio tridimensional que fluye desde todos los puntos y direcciones dentro del mismo. A dicha función la llamamos función plenóptica. Dicho en otras palabras, es la forma de representar la luz y actualmente se pueden crear imágenes a partir de estos. Para generar un campo de luz, es necesario obtener varias vistas a partir de varios puntos de la escena
Geometría epipolar
Las cámaras plenópticas trabajan de una manera similar a la geometría de un sistema de visión estéreo, ya que lo hacen de a 2 micro imágenes, para lo cual se utiliza el termino de geometría epipolar, que es cuando dos cámaras ven una escena 3D desde dos posiciones distintas, hay una serie de relaciones geométricas entre los puntos 3D y sus proyecciones en las imágenes 2D que generan restricciones entre los puntos de la imagen.
A continuación, se podrá observar la configuración básica con dos cámaras tomando una imagen de la misma escena
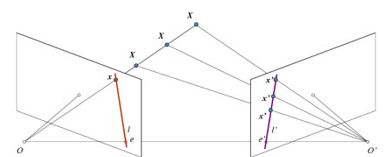
La proyección de los diferentes puntos en OX forman una línea en el plano derecho (línea l’). Lo cual se conoce como la epilina correspondiente al punto x, es decir que para encontrar el punto x en la imagen derecha, se debe buscar a lo largo de esta epilina., por lo cual debe estar en algún lugar de esta línea. Visto de otra manera para encontrar el punto de coincidencia en otra imagen, no es necesario buscar en la imagen completa sino sólo buscar a lo largo de la epilina. Lo cual se conoce como restricción Epipolar. Del mismo modo, todos los puntos tendrán sus correspondientes epilíneas en la otra imagen y el plano epipolar en este caso sería XOO’.
O y O’ corresponden a los centros de la cámara. Por otro lado, se puede ver que la proyección de la cámara derecha O’ se ve en la imagen izquierda en el punto e, lo cual se conoce como epípolo. El epipolo es el punto de intersección de la línea a través de los centros de la cámara y los planos de la imagen.
Todas las epilinas pasan por su epipolo, por lo cual al encontrar la ubicación de epipolo, se puede encontrar muchas epilinas y encontrar su punto de intersección. Conociendo toda esta información hace posible poder triangular el punto 3D de manera precisa.